


 Yeni Kayıt
Yeni Kayıt






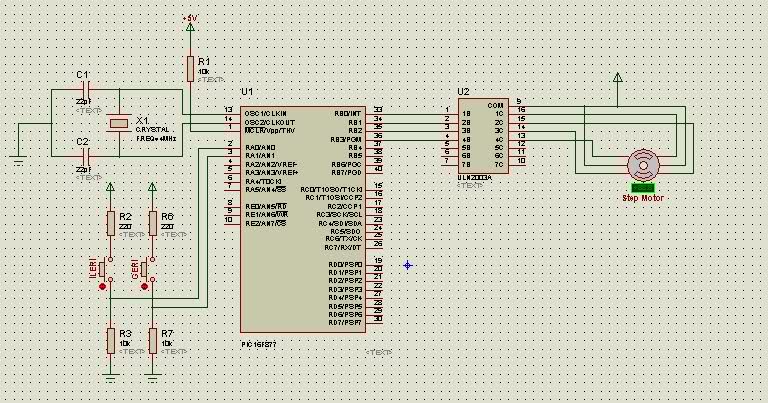
 Konudaki Resimler
Konudaki Resimler
|




















Bildirim

 Starbucks Toffee Nut Latte Kahve Karışımı 4x23 Gr (1 Kutu) : Amazon.com.tr: Gıda Ürünleri
https://www.amazon.com.tr/dp/B0C6M5JVVK
3 ay önce paylaşıldı
Starbucks Toffee Nut Latte Kahve Karışımı 4x23 Gr (1 Kutu) : Amazon.com.tr: Gıda Ürünleri
https://www.amazon.com.tr/dp/B0C6M5JVVK
3 ay önce paylaşıldı




|
|

